Bad Memories
Reduce! Reuse! Recycle!
So, Z mentioned using an old hard drive as the base chassis of a bot... and I'm running with the idea.
Goals
- Build a thing
- Take the thing to an event
- Watch it be destroyed
- Rebuild the thing
- Wash, rinse, repeat as desired
Build Log
We Have Begun!
Or more specifically, money has been spent, and I have an idea on what I wish to accomplish. Initial idea is to essentially mount a plate to the bottom of the hard drive that has the motor mounts, as well as mounting for everything else. I think I can stuff the electronics under the lid since everything is out of the first donor hard drive.
Design Tweaks
Chatting with Z while designing...
In other news, I bought a FrSky XSR-SIM to go with my Horus X10S so if I lose interest in all this I will at least have something to do with that fancy transmitter.
Also purchased today... motors, wheels, batteries, charger, motor mounts, another motor, and more bits of hardware. This goes with the RC transmitter, receiver, and ESC ordered yesterday. It's happening, y'all.
This costs how much?
Wow, this gets expensive, quick. As this is a completely fresh starting point, there are a few extra items to buy that can be reused time and time again in the future, in particular, a transmitter. Ended up going with a FrSkey Horus X10S, as it was a "good price". Granted, I could have gone for something about 1/5 the price that and had a controller that is more than capable of making it to the tournament at BattleBots, but I really liked the look of the X10S. There is no correlation between controller and wins.
Also in the pile of "not exactly for the first bot" is a random grab of hardware... scerws, mounting plates, and so on. I bought more ESC than I need, so that can be reused assuming it isn't destroyed in a flaming ball of death. Speaking of flaming balls of death (the batteries), also bought a couple lipo guard bags. Also bought a hot air wand to have something a little nicer than an open flame for the heat shrink tubing.
Fun with mixes
The goal for Sunday... bind the receciver to the transmitter and make something... anything... happen. Bought a couple of cheap servos and a cheap brushless ESC with a BEC, but more importantly, with a prewired XT60 battery connector. Was not in the mood to break out the soldering iron just yet. Second goal was to make the setup properly fail safe.
The binding procedure... had to find a video to show me how. I think something was lost in translation... from English to English... in my head. Ultimately, you are supposed to hold the F/S
in while powering on the receiver with the radio in bind mode. Over the previous few days have setup the transmitter how I think it should work, even with a flip/inverted mode triggered by SWA. Also bound
SWF to a channel so I can use it the Scorpion XL's flip feature.
Smoke Test / Pretty Lights / Mount Up
Soldered up a battery lead for the Scorpion XL, soldered leads to the proper batteries, and connected it up. It worked! And to verify my flip function on t he transmitter was correct, I tried the one implemented in the ESC... and it turns out I was wrong. If there is one thing I like about the Scorpion XL, it's that its lights sure are pretty.
And what came in the mail today? All the various bits of hardware needed to mount the motors and wheels to the bottom of that hard drive so I can see if this will even work before I spring for some custom machined parts.
Quick Update
Design is mostly settled. It looks something like this:
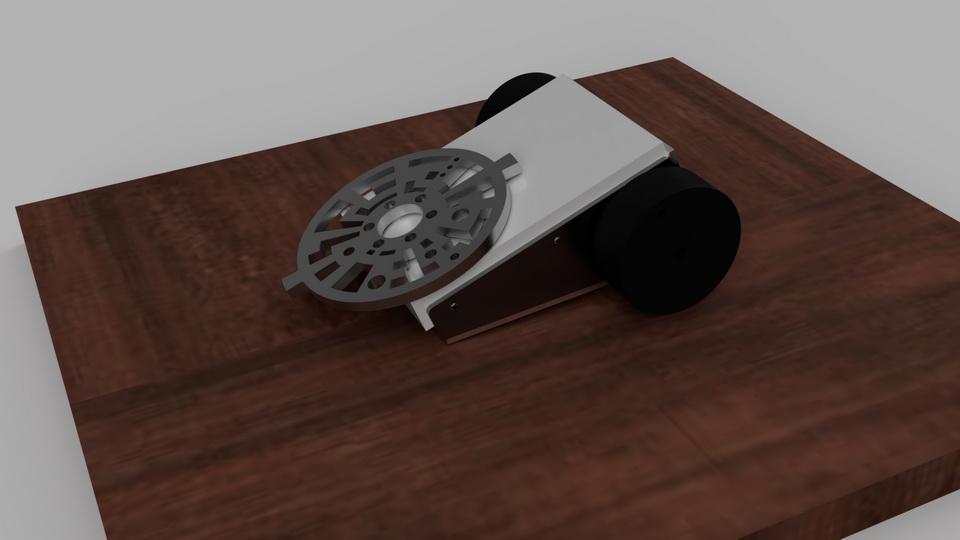
I have yet to figure out how to get the weapon and motor mounted on the bot. For a closer look at the weapon:
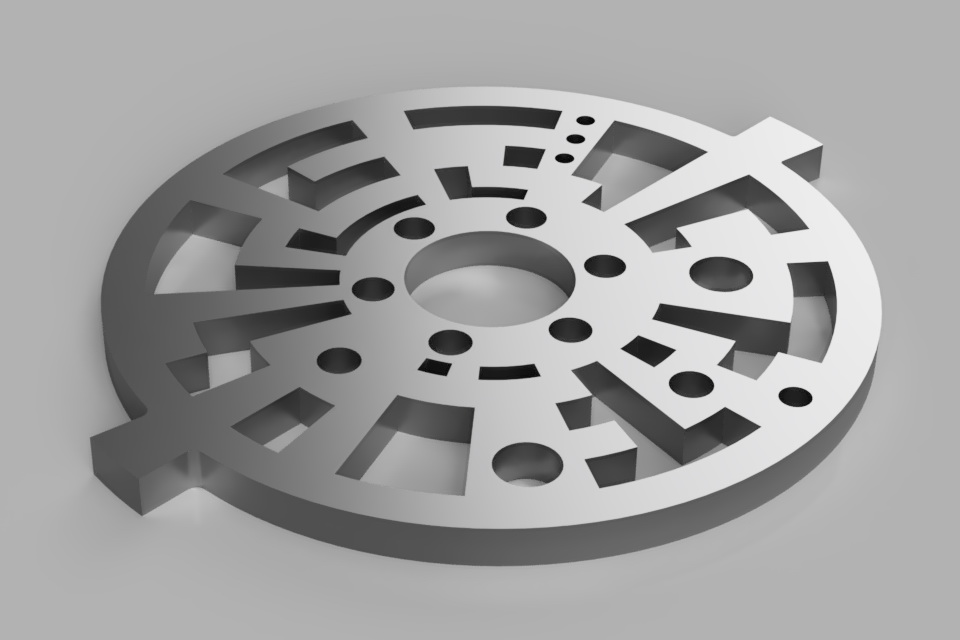
The side panels and bottom plate are being machined by Wedge Industries. The weapon, made of 0.25" AR500, was cut by SendCutSend.